




Khái niệm đo sâu hồi âm
Đo sâu hồi âm là công nghệ sử dụng sóng âm để xác định khoảng cách từ bộ phận phát tính hiệu tới bề mặt phản (bùn, cát, đáy sông, đáy biển, đáy ao hồ..)

Công nghệ đo sâu hồi âm
Nguyên lý đo sâu hồi âm thực chất là áp dụng công thức S=v*t.
Trong đó: S là khoảng cách truyền âm.
v là vận tốc âm hay còn gọi là tốc độ âm.
t là thời gian truyền âm.
Nhưng trong thực tế khi bộ phận ra sóng âm truyền qua nước gặp bề mặt phản xạ âm sẽ dội lại bộ phận ghi nhận. Tốc độ âm là một hằng số do đó thời gian truyền âm sẽ là biến số. Suy ra khoảng cách từ bộ phận phát sóng âm đến bề mặt phản xạ là h=S/2 =1/2(v*t). Để xác định được độ cao và vị trí tọa độ tức thời chúng ta phải kết nối máy đo sâu hồi âm với hệ thống định vị DGPS và quan trắc mực nước tại thời điểm đo.
Kỹ thuật đo sâu kết hợp việc xác định độ cao bằng phương pháp GPS – RTK:
Đây là phương pháp đo động thời gian thực, sử dụng máy thu GPS 2 tần số, độ chính xác cao ở mức độ mm – cm về mặt bằng.
Đây là phương pháp đo động thời gian thực, sử dụng máy thu GPS 2 tần số, độ chính xác cao ở mức độ mm – cm về mặt bằng.

Nguyên lý kỹ thuật đo sâu RTK
Sơ đồ trên mô tả nguyên tắc xác định độ cao đáy sông bằng kỹ thuật RTK, trong đó:
h: là độ chênh cao giữa hai anten trạm cơ sở và trạm động, được xác định bằng kỹ thuật RTK với độ chính xác cm
a: là chiều cao anten của trạm cơ sở so với mốc đươc đo bằng thước với độ chính xác khoảng 5mm
h0: là độ cao của mốc so với mặt Geoid tham khảo
f: là chiều cao anten của trạm động so với mực nước tại vị trí của thuyền được đo bằng thước với độ chính xác cm
d: là độ cao của đáy đo được bằng máy đo sâu hồi âm
h: là độ cao đáy sông được tính theo công thức
h = hw – d
hw: là đo cao tức thời của mực nước tại thuyền ở thời điểm đo, được xác định theo công thức:
hw = h0 + a – dh – f
a: là chiều cao anten của trạm cơ sở so với mốc đươc đo bằng thước với độ chính xác khoảng 5mm
h0: là độ cao của mốc so với mặt Geoid tham khảo
f: là chiều cao anten của trạm động so với mực nước tại vị trí của thuyền được đo bằng thước với độ chính xác cm
d: là độ cao của đáy đo được bằng máy đo sâu hồi âm
h: là độ cao đáy sông được tính theo công thức
h = hw – d
hw: là đo cao tức thời của mực nước tại thuyền ở thời điểm đo, được xác định theo công thức:
hw = h0 + a – dh – f
Trạm tham khảo trên bờ cần phải được định vị trên một mốc đã biết tọa độ và cao độ. Tuy nhiên, máy thu tại trạm tham khảo phải có khả năng thu nhận tín hiệu ở cả trị đo pha và trị đo giả cự ly của vệ tinh GPS. Trạm tham khảo sẽ tập hợp trị đo pha, trên cả 2 tần số L1/L2 dùng kỹ thuật tương quan chéo. Bộ xử lý tại trạm tham khảo sẽ tính toán khoảng cách giả và số hiệu chỉnh pha sóng tải, và định dạng dữ liệu theo chuẩn phù hợp với việc truyền tải dữ liệu. Thông thường, các số hiệu chỉnh sẽ được định dạng theo chuẩn RTCM SC-104 v.2.1 để truyền đến trạm Rover ở trên tàu.
Kỹ thuật RTK cho phép di chuyển máy thu ở trạm Rover trên tàu sau khi trị nhập nhằng (Integer Ambiguity – N) giữa vệ tinh và máy thu được giải thành công. Tuy nhiên, với các hệ thống GPS hiện đại ngày nay (đặc biệt là máy thu 2 tần số), việc giải đa trị thường xảy ra rất nhanh (khoảng vài giây), nên thông thường sau khi cài đặt các thiết bị, và phát tín hiệu thì hầu như lập tức ta có được nghiệm fixed ở trạm Rover. Vì vậy, cao độ an ten luôn luôn có được ngay thời gian thực. Khi đó, ảnh hưởng khi triều lên/ xuống, hay do sóng ảnh hưởng đến cao độ an ten bị thay đổi thì với kỹ thuật RTK đã được khắc phục triệt để.
Kỹ thuật RTK cho phép di chuyển máy thu ở trạm Rover trên tàu sau khi trị nhập nhằng (Integer Ambiguity – N) giữa vệ tinh và máy thu được giải thành công. Tuy nhiên, với các hệ thống GPS hiện đại ngày nay (đặc biệt là máy thu 2 tần số), việc giải đa trị thường xảy ra rất nhanh (khoảng vài giây), nên thông thường sau khi cài đặt các thiết bị, và phát tín hiệu thì hầu như lập tức ta có được nghiệm fixed ở trạm Rover. Vì vậy, cao độ an ten luôn luôn có được ngay thời gian thực. Khi đó, ảnh hưởng khi triều lên/ xuống, hay do sóng ảnh hưởng đến cao độ an ten bị thay đổi thì với kỹ thuật RTK đã được khắc phục triệt để.
Như vậy kỹ thuật RTK cung cấp cho ta cả vị trí mặt bằng và độ cao chính xác của anten ở thời điểm đo. Điều này giúp tránh được những khuyết điểm của quá trình xác định độ sâu bằng đo mực nước.

Kỹ thuật đo sâu kết hợp quan trắc mực nước:
Quan trắc mực nước là xác định độ cao của mực nước kết hợp với kết quả đo sâu ta tính được độ sâu của đáy.

Nguyên lý kỹ thuật đo sâu hậu xử lý
Sơ đồ dưới đây mô tả nguyên tắc xác định độ cao đáy sông (HB) bằng đo GPS động.
Trong đó:
• hA là chiều cao anten của trạm cơ sở so với mốc, được đo bằng thước với độ chính xác khoảng 5mm.
• hB: Độ cao anten của trạm động (Rover) so với mặt Ellipsoid tham khảo.
• f: là chiều cao anten của trạm động so với mặt đáy đầu sensor máy hồi âm tại vị trí của thuyền, được đo bằng thước với độ chính xác cm.
• D: là độ sâu của đáy, đo được bằng máy đo sâu hồi âm.
• HA: là độ cao của mốc so với mặt ellipsoid tham khảo (giả sử không sai số).
Trong đó:
• hA là chiều cao anten của trạm cơ sở so với mốc, được đo bằng thước với độ chính xác khoảng 5mm.
• hB: Độ cao anten của trạm động (Rover) so với mặt Ellipsoid tham khảo.
• f: là chiều cao anten của trạm động so với mặt đáy đầu sensor máy hồi âm tại vị trí của thuyền, được đo bằng thước với độ chính xác cm.
• D: là độ sâu của đáy, đo được bằng máy đo sâu hồi âm.
• HA: là độ cao của mốc so với mặt ellipsoid tham khảo (giả sử không sai số).
-
HB: là độ cao của đáy sông, được tính theo công thức:
HB = HC – D
Giả thiết trên chỉ đúng ở vùng nước yên tĩnh không có tác động của sóng, gió, dòng chảy….Trong thực tế nhiều nguyên nhân có thể gây ra sự chênh lệch mực nước giữa trạm đo gần bờ và vị trí đo sâu như: ảnh hưởng của đoạn sông cong, đoạn sông co hẹp hay mở rộng, tác động của gió sóng thủy triều…. Những ảnh hưởng này làm cho độ cao mực nước tại thuyền và tại bờ chênh nhau.
- KẾT QUẢ ĐO SÂU HỒI ÂM BẰNG GPS RTK - TRẠM BASE:
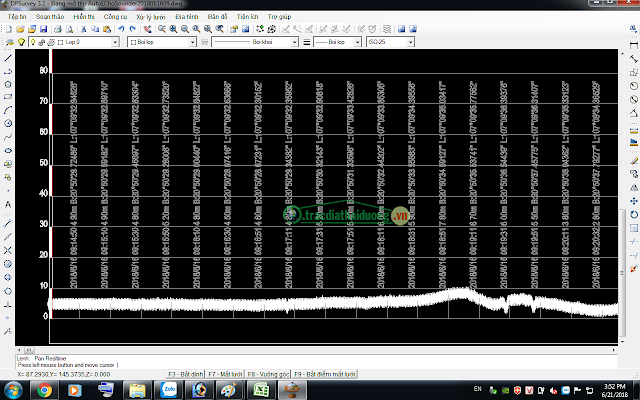
Băng đo sâu
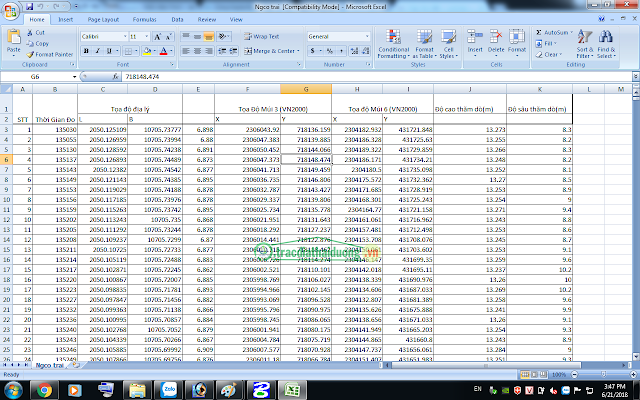
Dữ liệu đo sâu Excel

Dữ liệu đo sâu theo tuyến
- Thiết bị đo sâu hồi âm chuyên dụng:
Máy đo sâu HYDROTRAC II là dòng máy đo sâu phù hợp với việc lắp đặt trên các cano khảo sát có kích thước nhỏ. Hydrotrac II có lắp đặt máy in nhiệt với độ phân giải cao, tích hợp chức năng định vị DGPS nếu yêu cầu lắp đặt, chống nước, bộ nhớ Flash và cài đặt Side Scan (tùy chọn).
HYDROTRAC II là loại máy đo sâu hồi âm với thiết kế đặc biệt có thể lắp đặt trên cano khảo sát kích thước nhỏ và làm việc trong môi trường có điều kiện thời tiết khắc nghiệt. Với kích thước gọn nhỏ thuận tiện cho việc di chuyển và lắp đặt, HYDROTRAC II có khả năng chống thấm nước trong suốt quá trình hoạt động. Được tích hợp một máy in nhiệt cùng với toàn bộ các tính năng tiên tiến cho dòng máy đo sâu hồi âm của hãng ODOM, HYDROTRAC II là một sản phẩm chất lượng và có giá cả hợp lý.
Chỉ tiêu kỹ thuật:
Tần số
• 200 kHz (Tiêu chuẩn)
• 210, 40 & 33 kHz (Tuỳ chọn)
Hiệu suất
• 600 Watts
Nguồn cấp điện
• 11-28 VDC (Tiêu chuẩn)
• 110/220 VAC (Tuỳ chọn)
Cổng giao tiếp
• 2 cổng (RS232 hoặc RS422)
Đặc tính kĩ thuật
• Máy in nhiệt kích thước 8.5"/216 mm (giấy fax)
• Màn hình hiển thị LCD (1" chiều cao)
• Bàn phím điều điều khiển kín
• Lệnh điều khiển bằng trực tiếp/từ xa
• Tự động thay đổi tỷ lệ (phasing)
• Input số liệu GPS
• Input hiệu chỉnh sóng Heave từ motion sensor
• In ghi chú trên băng đo sâu
• Tự động xác định độ dài xung, AGC & TVG
• Xuất số liệu: NMEA, ECHOTRAC, DESO 25, v.v.
• Không thấm nước
• Trọng lượng nhẹ (24.8 lbs./11.25 kg.)
• Kích thước nhỏ (14.5 cao x 16.5 rộng x 8.0 dài inches); (36.83 cao x 41.91 rộng x 20.32 dài cm)
• Độ chính xác:
200 kHz-1cm ± 0.1% của giá trị độ sâu (hiệu chỉnh cho tốc độ âm thanh)
33 kHz-10cm±0.1% của giá trị độ sâu (hiệu chỉnh cho tốc độ âm thanh)
• Độ phân giải: 0.1 ft./.01 mét
• Số liệu in kèm các điểm đánh dấu: Ngày tháng, Thời gian, Số điểm, Độ sâu (và toạ độ GPS nếu có)
• Cần phát biến quét ngang 200KHz (Tuỳ chọn)
• Bộ thu nhận tín hiệu DGPS Beacon có kèm ăng ten (Tuỳ chọn)
• Bộ hiển thị Trái - Phải (Tuỳ chọn)
• Nâng cấp bộ nhớ Flash
• Tích hợp chương trình giả lập
• Độ nhạy
• Tắt/ mở máy in băng đo sâu hoặc chạy băng đo về trước
• Tạo event Mark (đặt thời gian trong máy đo)
• Công suất truyền dẫn (600/160/35 watts)
Thông số kỹ thuật
Máy Đo sâu hồi âm SOUTH SDE 28D – Sản xuất SOUTH và phân phối độc quyền bởi đại diện Tập đoàn sản xuất máy trắc địa SOUTH tại Việt Nam.
|
Tên Máy
|
SOUTH SDE 28
|
|
|
Chỉ tiêu kỹ thuật
|
||
| Tần số |
200Khz
|
|
| Góc chùm tia |
7˚
|
|
| Màn hình hiển thị |
12.1 inch. Màn hình màu LCD TFT
|
|
| Nguồn năng lượng đầu ra |
200W
|
|
| Độ phân giải độ sâu |
1cm
|
|
| Độ chính xác |
±1cm
|
|
| Tốc độ truyền sóng |
1300 – 1650m/s
|
|
| Dải độ sâu L |
0.39m – 220m
|
|
| Chiều dài xung |
Được lựa chọn tự động với khoảng lựa chọn rộng
|
|
| Cổng kết nối |
RS 232. Ba
Tin liên quan
Chia sẻ bài viết: Xem thêm:
Bình luận:
Danh mục sản phẩm
sản phẩm bán chạy

MÁY RTK CHCNAV E90
Liên hệ

MÁY SOUTH GALAXY G6
Liên hệ
_thumb.jpg "MÁY RTK CHCNAV I50")
MÁY RTK CHCNAV I50
Liên hệ
 Kinh tuyến trục hệ tọa độ Quốc gia VN2000 của 34 tỉnh thành mới sau sáp nhập
Kinh tuyến trục hệ tọa độ Quốc gia VN2000 của 34 tỉnh thành mới sau sáp nhập
Kinh tuyến trục hệ tọa độ Quốc gia VN2000 của 34 tỉnh thành mới sau sáp nhập như thế nào?
 Cách Sửa Máy GNSS RTK Và Các Phụ Kiện Kèm Theo
Cách Sửa Máy GNSS RTK Và Các Phụ Kiện Kèm Theo
Khi tiến hành sử dụng máy ngoài thực tế, khó tránh khỏi các phát sinh hoặc trục trặc kỹ thuật. Vậy cách sửa máy GNSS RTK là như nào?
TRẮC ĐỊA THÁI DƯƠNG
CÔNG TY TNHH THƯƠNG MẠI VÀ CÔNG NGHỆ TRẮC ĐỊA THÁI DƯƠNG
Địa chỉ trụ sở: Số 4 ngõ 12/53 đường Phạm Văn Đồng, Phường Đông Ngạc, Thành phố Hà Nội, Việt Nam. Mã số doanh nghiệp: 0108187145 do Sở tài chính Thành Phố Hà Nội - Phòng đăng ký kinh doanh và tài chính doanh nghiệp cấp ngày 16/03/2018
VPGD : 232 Phạm Văn Đồng (Nơi trưng bày sản phẩm)
- HỖ TRỢ KT 1 :
- HỖ TRỢ KT 2 :
Kết nối với chúng tôi
© Bản quyền thuộc về TRẮC ĐỊA THÁI DƯƠNG. Thiết kế bởi hpsoft.vn

| |




.png)